%20copy.png)
June 18, 2026
Closing the Loop: Data-Driven Control for Pneumatic Grippers
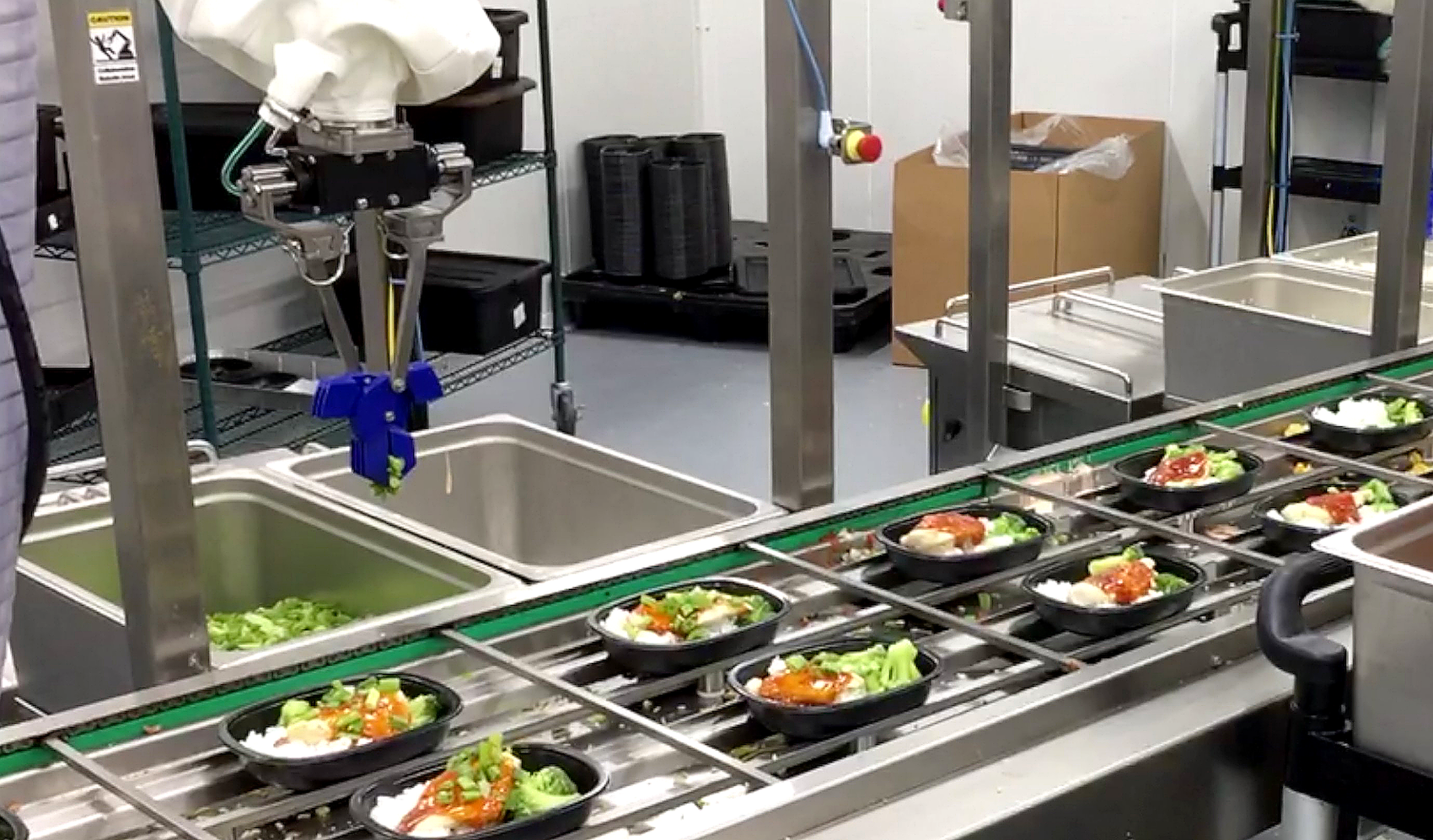
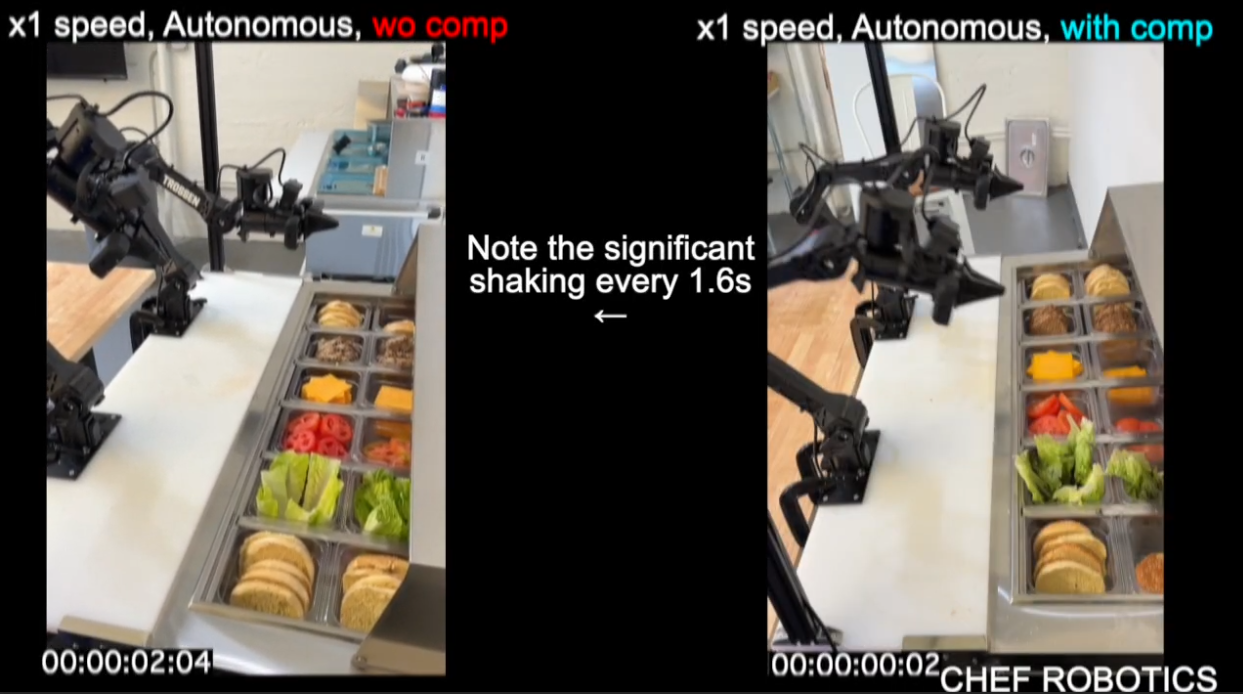
Chef robots pick and deposit food ingredients thousands of times per hour using pneumatic grippers. Gripper opening speed directly affects placement quality and throughput, but pneumatic systems vary across robots and degrade over time, making manual tuning unreliable. We built a layered system—using a flowmeter, regression, a neural network, and online adaptive control—to measure what the gripper actually does and automatically correct for it, without manual intervention.
Chef
Read More